Powering and locomotion
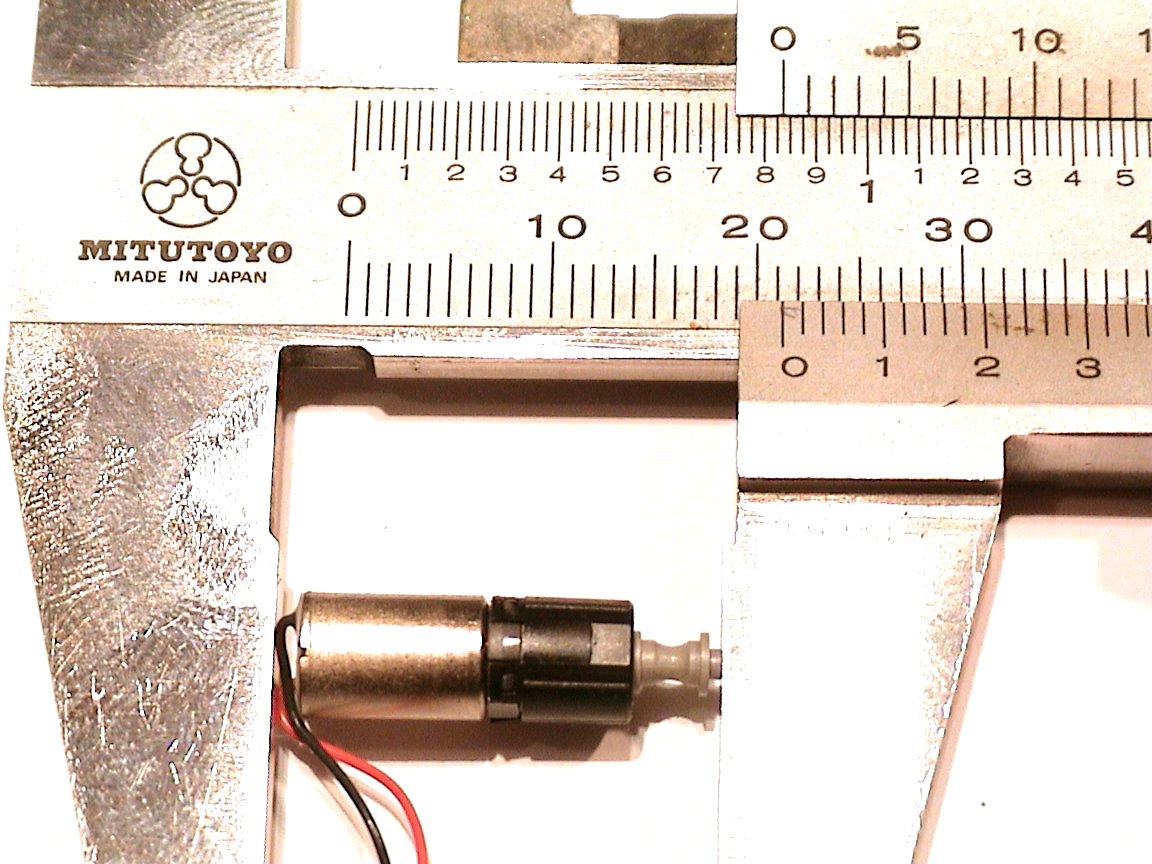
As motors for a micro-robots, currently only one motor type (GM15-solarbotics or RM-N1-robotmaker) is really suitable (size 21x6mm).
 |  |
There are also a lot of interesting micro-motors manufactured and provided by faulhaber-group, however they are quite expensive.
Some difficulties represent a motor-wheel coupling. There are a few designs (thanks to Marc, Ramone and Colin) used in chassis shown in sections Jasmine II
l.jpg) |
 |
 |
.jpg) |
Two GM15/RM-N1 motors consume about 180 mA at 5V, the overal power consumption with a control board lies over 200-220 mA. For powering we use lipo accumulators, they have enough capacity for running time of 1-2 hours at relatively large voltage (3.7V per cell). Since we would like to use accu at 1C, only lipo accu with C>200-220 mA/h are suitable. We choose finally with C=250mA/h, see figure below right, (size 25x28x4 5,7g and 25x28x10 12g for two cells), however accu with C=130mA/h, see figure below left, represents an alternative.
.jpg)
These are small 9mm square clear-epoxy encapsulated solar cells generating about 1/2 volt, 1.9mA in sunlight, however after several experiments we skip this solution because a limited number of solar cells does not produce enough power for the robot and daylight essentially distorts IR communication and sensing (instead we use auto recharging approach, see Auto Recharger).
