Docking station for auto recharging
Keeping a large swarm charged up and running smoothly could be difficult without some automated method of charging and reprogramming. A station that a bot could automatically find and dock with is desirable. The ability to gang together multiple docking stations into a wall is desirable to support large swarms.
The charging circuitry in a docking station could be very simple if all of the charging management is on the bot. In this case, just a constant voltage is required. Moving the charging circuitry off of the bot into the docking stage may increase the complexity of the bot-charger interconnect, as IR drops need to be considered. Also, it becomes more difficult to power the bot while recharging the batteries if the charging circuitry is in the docking station. See the Smart Power Module page for more on charger circuitry location tradeoffs.
The ability of a bot to find a charging station may be a challenge. Each charging station could have an IR beacon that periodically broadcasts a message which the bot could locate. If many charging stations are used, this may create more background IR noise that desired though. Perhaps charging stations located near each other need to be synced together, such that they all broadcast simultaneously and thus limit the amount of interference to short periods of time. Synchronization would also increase the perceived brightness of the signal from a distance, and therefore make it easier for a bot to see the beacon from across the arena. This could be a bad thing too, as it increases the range of interference.
If an IR beacon is used, it should be disabled, or a different message transmitted when a bot has docked. Disabling would be the easiest, but broadcasting a different message would allow bots to still find the station and wait their turn. If the message is disabled, then a bot low on batteries would unnecessarily drive around wondering where the station is.
It may be desirable to have different stations depending on the size of the swarm and needs of the user. A simple low-cost charging station would provide an automated way to keep a swarm recharged, while a more sophisticated Maintenance Station would allow reprogramming the bot and communication between the bot and a host computer in addition to recharging. Finally, a Development Station would have all the functionality of the Maintenance Station plus a dynometer to allow the bot wheels to rotate freely and IR transceivers to exercise the bot's IR emitters and detectors. This station would be used for testing and developing code on the actual hardware.
Charging station
The simplest and lowest cost of the auto-stations only provides recharging functionality.
- Allows robot to autodock and recharge
- Simple regulated voltage source
- Two contacts to bot (Power, Gnd)
- Interconnects for ganging charging and maintenance stations together
Maintenance station
In addition to recharging, this station allows reprogramming the bot and communicating with the bot from a host computer. This station allows for bots to "check-in" and perhaps report new data to the host. The host can keep track of individual bots and make sure that all bots are still active (they are still periodically recharging), and still present. Furthermore, the health of each bot could be tracked - primarily how many times the battery has been recharged, or how many operational hours the bot has experienced.
- Allows robot to autodock, recharge, reprogram, and communicate with a host
- Simple regulated voltage source for recharging and for powering bot
- I2C communication with bot
- Four contacts to bot (Power, Gnd, Clk, & Data)
- Microcontroller to handle I2C communications
- Data flash for stand-alone mass reprogramming???
- USB or RS-232 communication with host computer for reloading data flash, or direct communication with bot
Development station (Future possibility?)
- All capabilities of maintenance station
- Capture device to hold bot in place
- Dynamometer to allow stationary operation of bot motors
- Quadrature encoders in dynamometers to provide feedback to host on virtual bot position
- IR emitters and detectors to exercise bot's IR transceivers
Common features
- Self-aligning docking bay
- Bay shape help aligns robot with contacts
- Magnetic alignment and capture slots
- Magnets strong enough to provide consistent contact pressure
- Magnets weak enough to allow bot to pull away under own power
- Vertical contact strips allow for variable height charging contacts on bot
- Variable height allows different modular configurations of bot
- Contacts are gold plated to acheive reliable connections and minimize corrosion
- Optical beacon to assist bot in finding charger
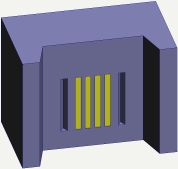
After many tests the following design of the docking station revealed as the most simple for docking with reliable contacts (actually this design has been suggested by Kristof Jebens in his thesis "Development of docking approach for autonomous recharging system in micro-robot „Jasmine“ and the docking approach developped by Afshin Attarzadeh in his thesis "Development of advanced power management for autonomous micro-robots"). It has the form of the two metal strips (copper, bronze) glued on the plastic surface.

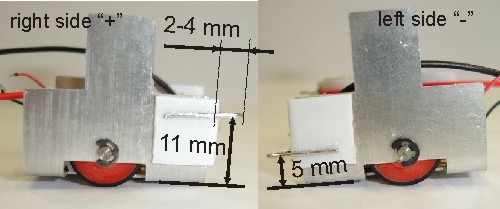
The robot has the installed metal contatcs (glued on a plastic strip, which is in turn glued on chassis)
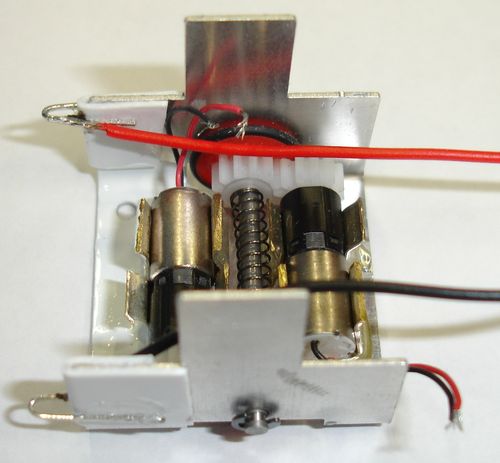
with the corresponding specification
The following "pedestal"

allows a manual recharing when the robots are simply put in the construction
