Assembling of the Motors Board
Assembling of the motorsboard is quite simple, however it reqires a few calibration steps needed for odometrical system. The motors board is usually delivered in the form of "Nutzen" like the main board (8+8 boards).
1. Step. Put bootloader into flash. Repeate this step like described in the assembling of the main board (instad ATMega 168 use here AtMega88).
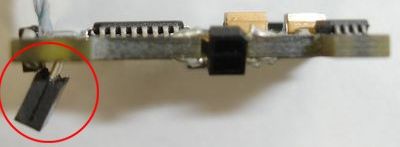
2. Step. Solder the touch sensor TCNT1000 as shown in figure below. Be carefully bending the legs, they could break off. DO NOT OVERHEAT THE SENSOR !!!
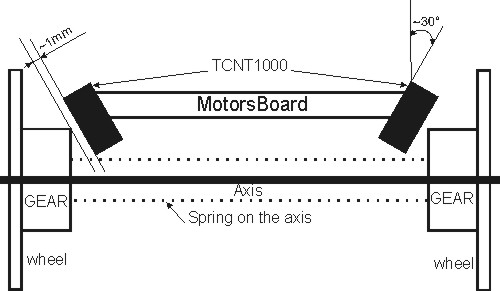
3. Solder the odometrical sensors TCNT1000. Solder both sensors in the position shown in figure below.
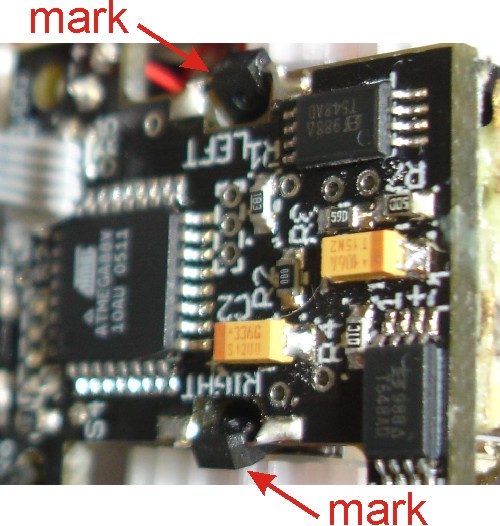
Make sure that sensors are placed about 30 grad incline to the vertical axis and about 1mm away from the gear. This position of the sensor is important for getting stable odometry.
(Tip for soldering: Put the sensor in the corresponding hole and solder first two lower legs. Then with a small screwdriver incline the sensor and solder two upper legs. Be careful bending the legs they could break off. DO NOT OVERHEAT THE SENSOR !!! )
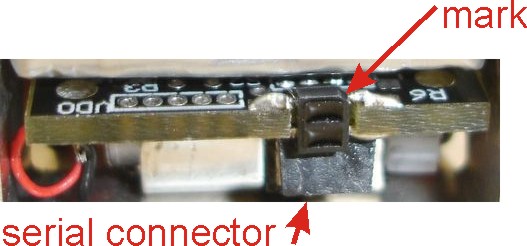
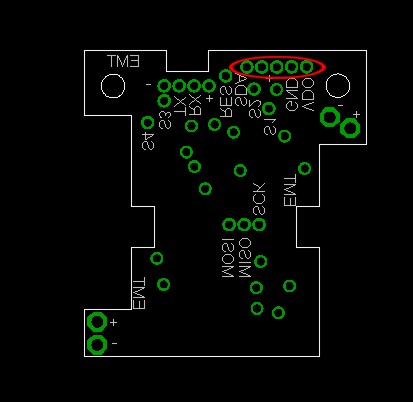
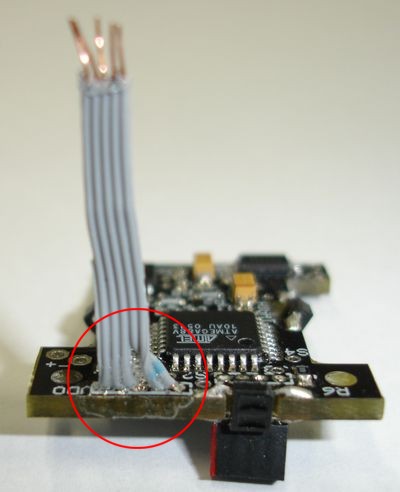
4. Solder the serial interface connector. You will receive the 1x10 connector
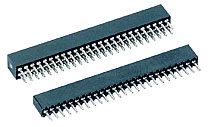 . Divide it into 1x4 and 1x4 parts. Put the connector from the bottom side slightly (for later bending !!!) into the holes and solder it from the top side in the position shown below.
. Divide it into 1x4 and 1x4 parts. Put the connector from the bottom side slightly (for later bending !!!) into the holes and solder it from the top side in the position shown below.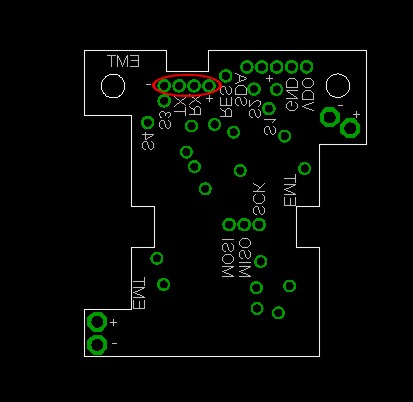
Bend the connector so that it touchs the touch sensor (you can reach the connector only in this position with the serial upload link). Mark the "+" pin with red color.
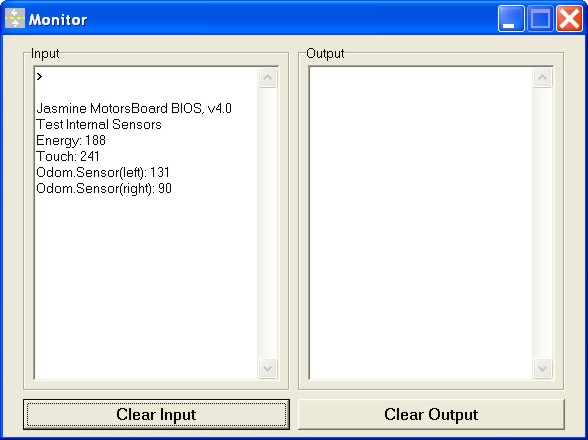
5. Test the energy, touch and odometrical sensors Write the program into the flash jasmineMB_TestSensors.hex. It tests the internal sensors. All values should be larger than 0 (put some objects in front of the IR sensors).
6. Solder the TWI-bus cable. Cup 5 wires cable (lenght about 25 mm) from the delivered 80wires cabel. Cross two left wires (SCL and SDA lines) like shown in the figure below.
Solder the cable
and fix it with a bit of glue.
With this step the assembling of the MotorsBoard is finished, and you can start with the assembling of the robot.