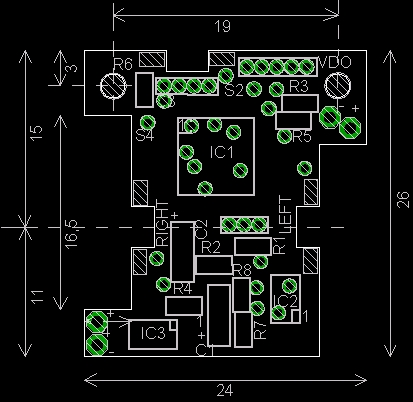
Motion control board for Jasmines II amp III
Motion board is the lower-extention board for all Jasmine robots. The main purpose of this board is a cooperative actuation in robotic swarm (for gripping or pushing objects by many micro-robots). For that the board has motors control directly connected with odometrical system, touch sensor for detecting object's touch as well as can detect color of surfaces. Board supports precision motion commands like Move(10mm), where robot really moves on 10 mm (the same for rotation). It has:
Electrical characteristics:
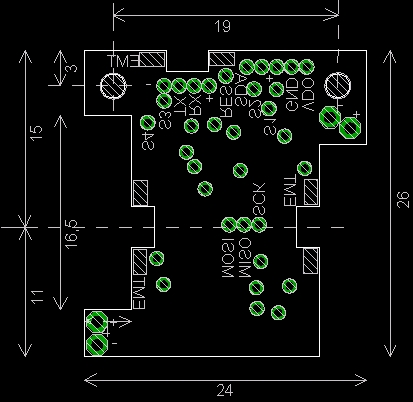
The board uses ATMega88 microcontroller.

The board has TWI slave-adress 2 and support general call (see list of TWI commands in TWI Interface ).
- Motion drivers based on SI9988 with PWM control (wheels or gripper motors)
- Odometrical system on both wheels. It measures physical rotation of wheels (not motors) with accuracy of less than 1mm final robot displacement (currently 0.5mm).
- Energy sensor for LiPo accu (direct voltage of accu).
- IR-based low-range touch sensor on the front of the robot.
- Color sensing system (for R G B of surfaces) on the front or on the bottom (for floor colors) of the robot.
- Possible additional sensors as e.g. light sensors on the from of the robot.
Electrical characteristics:
- Consumes about max. 30 mA (3V) from the regulated power line when all emitting sensors are on.
- Consumes about max. 170 mA (3,7V) from non-regulated power line to drive two motors.
- In sleep mode the power consumption is less than 3mA
- It has no internal power regulation.
The board uses ATMega88 microcontroller.
The board has TWI slave-adress 2 and support general call (see list of TWI commands in TWI Interface ).
 |  |