Color Sensing Board

The choice of components for the color sensor board was not easy due to the limited space available on the robot and restriction in power.
The robot as its own white LED, a E1L33-AW0A2? from TOYODA GOSEI, for illuminating the colored object.
For the color sensing board a color sensor TCS230 from TAOS is used for detect the RGB value of the reflected light from the object. It can be driven with a voltage from 2,7 to 5,5, now though it is powered with the regulated voltage from the microcontroller and it is working within a range from 300nm to 1100nm. The Sensor has four options for what color of the filter that will be used, Red, Green, blue and without filter. The picture above is from the first prototype. After some cosmetically changes of the PCB board, it was made shorter in order to fit underneath the motorboard, so that it can also be mounted downward for observing colors on the ground.
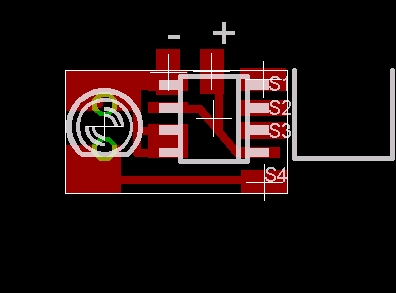
As seen on the Picture above, 4 ports are being used, the two on the upper right side is for controlling what filter that is currently being used, the 3:rd is for the output to the microcontroller and the last one is for controlling the diode. The construction of the PCD also means that the frequency from the color sensor will be scaled to 2% of the maximum value, this will definitely guarantee that it will not cause any problem due to that it is faster than the microcontroller.
At the moment it is only of interest to distinguish between a red, a green, a blue or a white colored object. The result of the measurement will be depending on the material the illuminated object. With the help of white calibrating at a distance of 30 mm it is possible to detect blue LEGO bricks at a distance of approximately 35 mm. Blue is harder to detect than red or green color for the color sensor. It can also be used to distinguish between a broader range of colors but at a more narrow distance, so in the future it can also see for example grey and yellow bricks.